



 案例频道
案例频道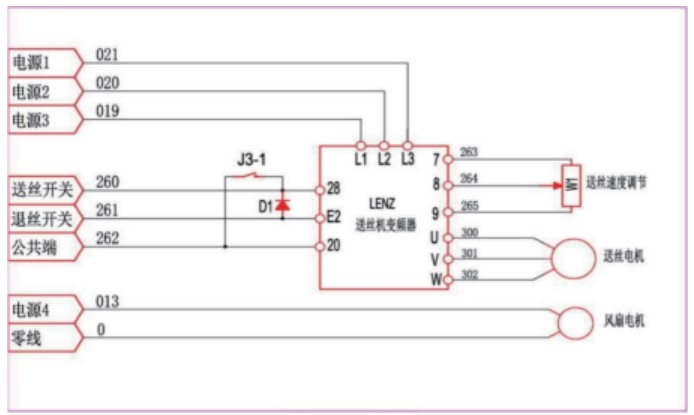
本研究围绕双向摆动连铸辊自动堆焊机的电气控制系统展开,旨在提高焊接工艺的控制精度和系统稳定性。本研究通过选择合适的可编程逻辑控制器(PLC)和伺服系统,并采用高精度控制算法,确保了在焊接过程中实现对焊接温度、焊丝进给速度和焊缝位置的精确控制。实验结果表明,本研究所设计的系统在动态响应、焊接精度以及长时间运行稳定性方面均达到预期目标,具备较高的可靠性和抗干扰能力,为进一步推广应用提供了技术保障。
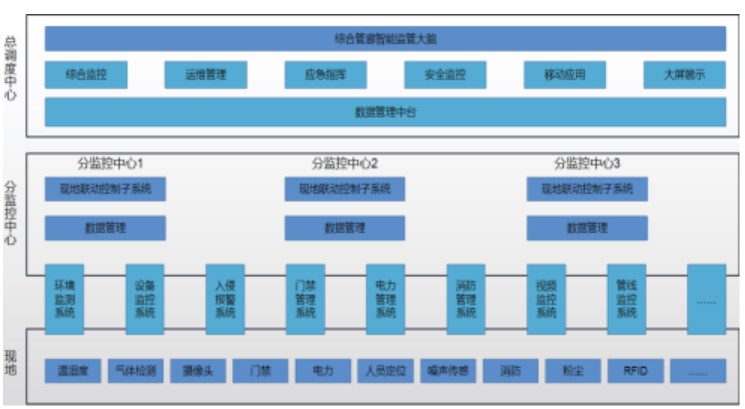
综合管廊是保障城市运行的重要基础设施。本研究以物联网、数字孪生、大数据、人工智能等信息技术为支撑,建设综合管廊智能监管系统,助力提升了管廊管理运行效能与安全水平,破解了综合管廊一体化管理难题。本文针对综合管廊智能监管系统关键技术进行分析,期望以数据驱动管廊智慧化管理和推动城市安全智慧运行。
乙烯裂解炉是一种在炉管内进行烃类裂解反应的关键设备,被誉为乙烯生产装置的核心。其主要功能是将天然气、炼厂气、原油及石脑油等原材料,在炉管内加热至所需的高温条件下,进行裂解反应生成裂解气(如乙烯、丙烯等烯烃类产品),为后续生产提供基础原料。
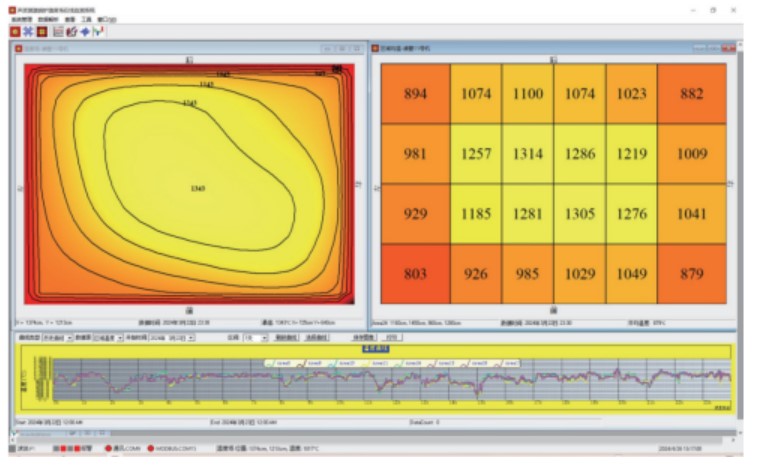
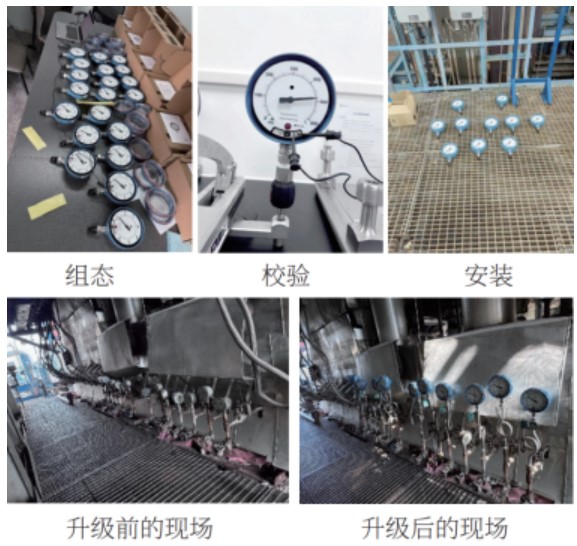
本文利用声波锅炉温度场在线监测系统,对某电厂330MW汽包锅炉燃烧状况进行了实时在线监测。监测结果表明,对锅炉运行过程中的燃烧偏差,在温度场的辅助下,通过调整锅炉二次风各角配风,可实现燃烧偏差调整。锅炉性能试验表明,该监测系统减少了锅炉燃烧偏差,稳定了锅炉运行,提高了锅炉燃烧效率,具有重要意义。

随着当前汽车行业竞争逐步加剧,以及消费者越来越追求产品个性化定制,企业不断加大车型研发投入,逐步缩短车型的生命周期。这也导致汽车厂商需要布局更多的生产基地或在同一个生产基地生产更多的车型来满足客户需求,以增加企业的核心竞争力。

随着全球对清洁能源需求的增加和技术的进步,锂电池在电动车、储能系统和消费电子产品中的应用越来越广泛,在制造过程中,通过赋码和扫码实现流程可追溯,不遗漏读码、不读错码是确保锂电池品质的重要一环。

本文基于电力供电企业配网专业技术人员在配电网日常运维中的经验与创新结合,将重合闸技术应用于配电网箱式变压器运行维护中。利用10千伏重合闸技术原理研制的箱式变压器低压自动重合闸装置,通过技术改造,形成了具有重合闸功能的箱式变压器,并在新疆博州县市城区配电网中得到了广泛应用。结果证明,其减少了供电企业的配网运维成本和电量损失,有效提升了配网供电可靠性,助力了配电网自动化的升级转型,也更好地服务了人民对美好生活的需求。

人工智能技术为优化储能系统的容量配置提供了新的解决方案。模块化储能柜能够实现更高效的电力管理,可以提升换电站的经济效益和系统稳定性。本文深入分析了换电站电力负荷规律,基于峰谷电价差构建了储能系统容量配置优化模型,利用LSTM网络预测了电力负荷,并通过混合优化算法实现了储能系统的高效配置。实验验证了储能系统在电网需求高峰和低谷条件下的响应速度、稳定性和经济效益。结果表明,采用人工智能技术的模块化储能柜能够显著提升换电站的运营效率和经济效益。
Korenix JetNet 4508 V2,在传输层组成了一个冗余环网,各个机房采集到的数据透过冗余环网接入中心监控机房。
电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号  北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号

 官方微信
官方微信

